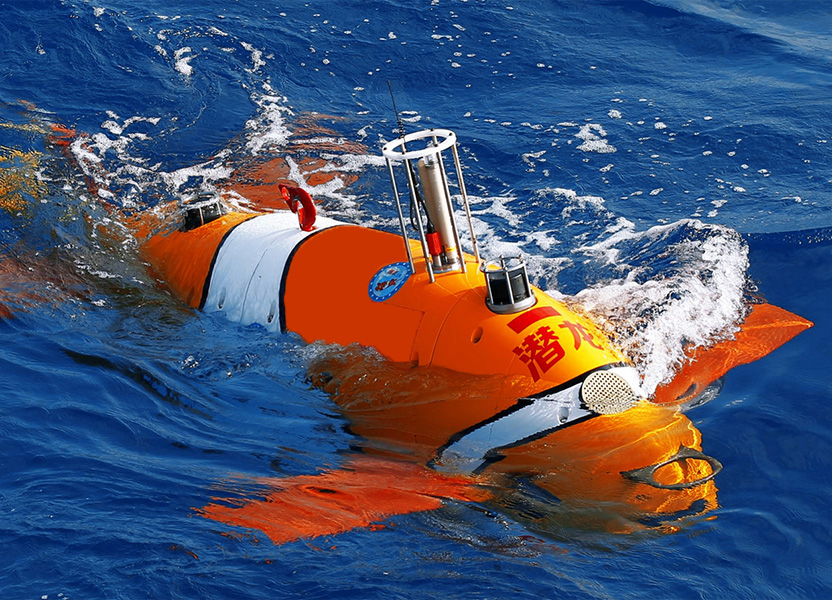
APPLICATION OF USV & AUV
The unmanned ship system is generally composed of RW, PC base station and remote controller, propulsion system,
navigation system, communication system, power supply and water quality monitoring system. The ship navigation board
can be equipped with GPS receiver, three-axis compass, three-axis accelerometer, and built-in navigation algorithm, so that
the ship can navigate accurately. In addition, the task data can be transmitted back to the base station through the wireless
communication module for operation processing. Accurate location information, real attitude information, and real-time,
accuracy, and availability of information
Berthing is the core and foundation to ensure the real-time application of unmanned ship control and measurement.
Navigation of underwater vehicle means that the mobile robot gets the state of itself with the help of sensors and completes
the autonomous movement process from the initial position to the target position. Navigation technology is the core of AUV.
Technology is also one of the most difficult key technologies to